Control Of A Cart Based Variable Length Inverted Pendulum Security Robot Using Lqr Information Center
Get comprehensive updates, key reports, and detailed insights compiled from verified editorial sources.
Background to Control Of A Cart Based Variable Length Inverted Pendulum Security Robot Using Lqr

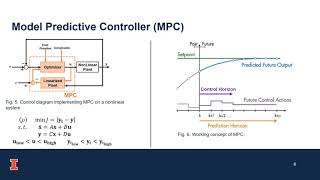
ECE 489 Milestone 5 presentation Seung Yun (Leo) Song May 11th 2020 Goal This video was for a We are the team of innovators working in the field of Controller Ti 69M launchpad . Driver lmd18200. Controller design by linear mathematics model. Simulate by simcap and ... Ever wondered how engineers stabilize one of the most unstable systems in the world? In this reel, I show the Double ENGI 9857- Implementation of LQR and Model Predictive Control on Inverted Pendulum on a Cart Lebanese American University School of Engineering Department of Industrial and Mechanical Engineering The controller and ...
Hi All This is near completion of final year project Project was about Stability of an The objective of this project was to develop a controller to maintain the
Key Details

Explore the primary sources for Control Of A Cart Based Variable Length Inverted Pendulum Security Robot Using Lqr.
Latest News

Stay updated on Control Of A Cart Based Variable Length Inverted Pendulum Security Robot Using Lqr's latest milestones.
Featured Video Reports & Highlights
Below is a handpicked selection of video coverage, expert reports, and highlights regarding Control Of A Cart Based Variable Length Inverted Pendulum Security Robot Using Lqr from verified contributors.

Control of a Cart-Based Variable-Length Inverted Pendulum Security Robot Using LQR

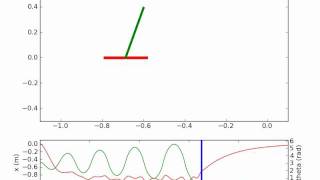
Inverted Pendulum LQR Controller Python
Expert Insights
Data is compiled from public records and verified media reports.
Last Updated: May 22, 2026
Conclusion

For 2026, Control Of A Cart Based Variable Length Inverted Pendulum Security Robot Using Lqr remains one of the most talked-about profiles. Check back for the newest reports.
Disclaimer:










![Control of Inverted Pendulum on Cart by LQR [MATLAB,SIMSCAPE]](https://i0.wp.com/ytimg.googleusercontent.com/vi/MPger8r4t5Y/mqdefault.jpg?resize=320,180)









