L1 Adaptive Mppi Architecture For Robust And Agile Control Of Multirotors Information Center
Get comprehensive updates, key reports, and detailed insights compiled from verified editorial sources.
Overview of L1 Adaptive Mppi Architecture For Robust And Agile Control Of Multirotors

This video shows the latest demos of the L1Quad. Our MPPI, Log-MPPI, TEB, DWA and PRIEST on dynamic environments Telluride Neuromorphic Workshop tutorial For Model Predictive Path Integral Augmented L1 Adaptive Control for Wheel-Legged Robots. This video is accompanying the paper "Sampling-based Model Predictive Step Response of L1 Adaptive Control vs MRAC with Wind Gust and Time Delay
Seulchan Lee and Sanghyun Kim, Manifold-Constrained { This is the presentation of our article entitled" Model Predictive Path Integral (Under review - ICRA 2025) This video demonstrates our
Important Facts

Explore the primary sources for L1 Adaptive Mppi Architecture For Robust And Agile Control Of Multirotors.
Developments

Stay updated on L1 Adaptive Mppi Architecture For Robust And Agile Control Of Multirotors's newest achievements.
Featured Video Reports & Highlights
Below is a handpicked selection of video coverage, expert reports, and highlights regarding L1 Adaptive Mppi Architecture For Robust And Agile Control Of Multirotors from verified contributors.
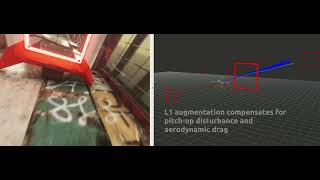
L1-Adaptive MPPI Architecture for Robust and Agile Control of Multirotors
L1Quad: L1 Adaptive Augmentation of Geometric Control for Agile Quadrotors
L1 Adaptive Augmentation for Geometric Tracking Control of Quadrotors
MPPI, Log-MPPI, TEB, DWA and PRIEST on dynamic environments
Expert Insights
Data is compiled from public records and verified media reports.
Last Updated: May 28, 2026
Final Thoughts

For 2026, L1 Adaptive Mppi Architecture For Robust And Agile Control Of Multirotors remains one of the most searched-for profiles. Check back for the newest reports.
Disclaimer:



















