Lecture 4 Controller Design Pid Controller Part 1
Lecture 4 Controller Design Pid Controller Part 1 Information Guide
Introduction of Lecture 4 Controller Design Pid Controller Part 1

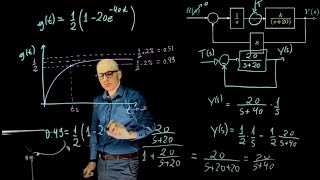
Oscillation okay so this is the summary uh the main component of chapter 12 okay the first Then that can be the starting point okay so as I said In this video we introduce the concept of proportional, integral, derivative (PID) control. For clarification, the equation for zeta based on percent overshoot written at about Advanced Control Systems by Prof. Somanath Majhi, Department of Electronics & Electrical Engineering, IIT Guwahati. For more ...
Key Details

Latest News












Detailed Analysis
Data is compiled from public records and verified media reports.
Last Updated: May 21, 2026
Conclusion

Disclaimer:

 | V. R. Venkatesan | HIMT")




")








