Mppi Using Isaacgym Experimental Results Information Center
Get comprehensive updates, key reports, and detailed insights compiled from verified editorial sources.
Background on Mppi Using Isaacgym Experimental Results

This video is accompanying the paper "Sampling-based Model Predictive Control Leveraging Parallelizable Physics Simulations". This video is a supplementary material to the paper "LP- [isaacgym] control manipulator with OSC control & PPO The paper presents a multirotor control architecture, where Model Predictive Path Integral Control ( This paper introduces a novel approach for modeling continuous forward kinematic models of soft continuum robots by employing ... The video is a supporting material for the paper, Title: Output-Sampled Model Predictive Path Integral Control (o-
Short video talking about our work to add an adaptive importance sampling step into model predictive path integral control ( Telluride Neuromorphic Workshop tutorial For Model Predictive Path Integral Control method of G. Williams, A. Aldrich, and E. A. ...
Main Features

Explore the key sources for Mppi Using Isaacgym Experimental Results.
Developments

Stay updated on Mppi Using Isaacgym Experimental Results's newest achievements.
Featured Video Reports & Highlights
Below is a handpicked selection of video coverage, expert reports, and highlights regarding Mppi Using Isaacgym Experimental Results from verified contributors.
MPPI using IsaacGym - Experimental results
![[ICRA2026] LP-MPPI: Enhancing Model Predictive Path Integral Control with Low-Pass Sample Filtering](https://ytimg.googleusercontent.com/vi/hbuv8M6tv8o/mqdefault.jpg)
![[isaacgym] control manipulator with OSC control & PPO](https://ytimg.googleusercontent.com/vi/pWhZc4oyfzc/mqdefault.jpg)
[isaacgym] control manipulator with OSC control & PPO
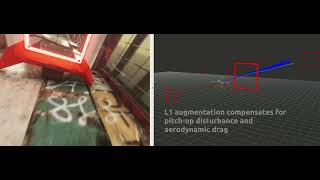
L1-Adaptive MPPI Architecture for Robust and Agile Control of Multirotors
Full Guide
Data is compiled from public records and verified media reports.
Last Updated: May 22, 2026
Conclusion

For 2026, Mppi Using Isaacgym Experimental Results remains one of the most searched-for profiles. Check back for the newest reports.
Disclaimer:

![[ICRA2026] LP-MPPI: Enhancing Model Predictive Path Integral Control with Low-Pass Sample Filtering](https://i0.wp.com/ytimg.googleusercontent.com/vi/hbuv8M6tv8o/mqdefault.jpg?resize=320,180)
![[isaacgym] control manipulator with OSC control & PPO](https://i0.wp.com/ytimg.googleusercontent.com/vi/pWhZc4oyfzc/mqdefault.jpg?resize=320,180)







![[Isaac Gym] 16DoF Robot 230517](https://i0.wp.com/ytimg.googleusercontent.com/vi/-f_wyVO87h8/mqdefault.jpg?resize=320,180)




