Proportional Control Solution Artificial Intelligence For Robotics Information Center
Get comprehensive updates, key reports, and detailed insights compiled from verified editorial sources.
About on Proportional Control Solution Artificial Intelligence For Robotics

For the rest of the videos in this course, go to and login as a guest. Explore LeRobot with Remi Cadene, Principal Research Scientist at Hugging Face. LeRobot is an open-source library of Hugging ...
Core Information

Explore the main sources for Proportional Control Solution Artificial Intelligence For Robotics.
Latest News

Stay updated on Proportional Control Solution Artificial Intelligence For Robotics's newest achievements.
Featured Video Reports & Highlights
Below is a handpicked selection of video coverage, expert reports, and highlights regarding Proportional Control Solution Artificial Intelligence For Robotics from verified contributors.

Proportional Control Solution - Artificial Intelligence for Robotics
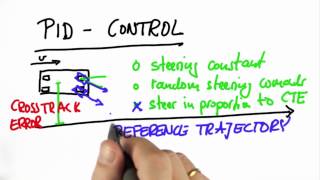
PID Control Solution - Artificial Intelligence for Robotics
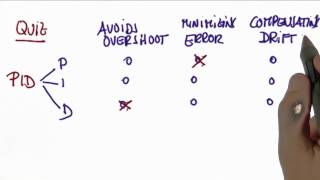
PID Solution - Artificial Intelligence for Robotics

PID - Artificial Intelligence for Robotics
Deep Dive
Data is compiled from public records and verified media reports.
Last Updated: May 22, 2026
Future Outlook

For 2026, Proportional Control Solution Artificial Intelligence For Robotics remains one of the most talked-about profiles. Check back for the latest updates.
Disclaimer:



















