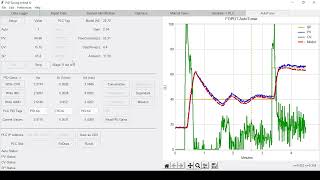
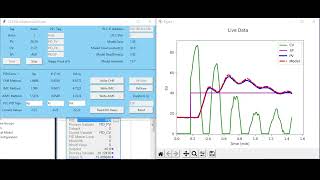
About on Python Pid Tuning Method 4 Autotuner With Adaptive Control
Second Order Plus Dead Time (SOPDT) Model Reverse Action - Cooling Loop. Multicopter PID Attitude Controller Gain Auto-tuning through Reinforcement Learning Neural Networks
Important Facts
Explore the key sources for Python Pid Tuning Method 4 Autotuner With Adaptive Control.
History
Stay updated on Python Pid Tuning Method 4 Autotuner With Adaptive Control's newest achievements.
Python PID Tuning: Method 1 - Process Reaction Curve

















")

")





 PID Controller Tuning Method")
 - PID Adaptive AutoTuner for PLC's")





