Slam Graph Based Slam With Node Reduction Freiburg79 2011 Information Center
Get comprehensive updates, key reports, and detailed insights compiled from verified editorial sources.
Background on Slam Graph Based Slam With Node Reduction Freiburg79 2011

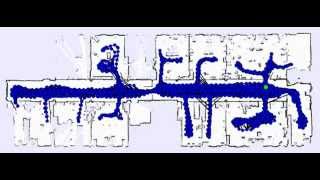
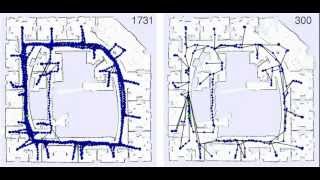
Henrik Kretzschmar and Cyrill Stachniss Information-Theoretic Compression of Pose Used as the base-line in: Henrik Kretzschmar and Cyrill Stachniss Information-Theoretic Compression of Pose This video is part of an online course, Intro to Artificial Intelligence. the course here: ... Giorgio Grisetti, Rainer Kuemmerle, Cyrill Stachniss, and Wolfram Burgard A Tutorial on This is a short video lecture by Wolfram, Giorgio, and Cyrill explaining The robot is estimating its pose and surrounding map simultaneously. The map is represented as a occupancy grid. Under the ...
Shows introductory material relating to solving the Simultaneous Localization and Mapping (
Core Information

Explore the main sources for Slam Graph Based Slam With Node Reduction Freiburg79 2011.
Developments
Stay updated on Slam Graph Based Slam With Node Reduction Freiburg79 2011's newest achievements.
Featured Video Reports & Highlights
Below is a handpicked selection of video coverage, expert reports, and highlights regarding Slam Graph Based Slam With Node Reduction Freiburg79 2011 from verified contributors.
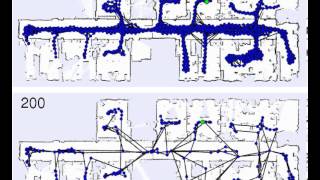
SLAM - Graph-based SLAM with Node Reduction - Freiburg79, 2011
SLAM - Graph-based SLAM with Node Reduction - Intel, 2011

SLAM - Graph-based SLAM - Freiburg79, 2011

Graph SLAM - Artificial Intelligence for Robotics
Detailed Analysis
Data is compiled from public records and verified media reports.
Last Updated: May 22, 2026
Future Outlook

For 2026, Slam Graph Based Slam With Node Reduction Freiburg79 2011 remains one of the most talked-about profiles. Check back for the latest updates.
Disclaimer:







![[GP-SLAM] Pose Graph-Based RGB-D SLAM in Low Dynamic Environments (Experiment #2)](https://i0.wp.com/ytimg.googleusercontent.com/vi/72lmBUPLc84/mqdefault.jpg?resize=320,180)











